




Sensor TOF VI53l0X laser tiempo de vuelo comm I2C
$20,00
Sensor VL53L0X ToF láser de alta precisión. Rango 2 cm – 2 m, resolución ±1 mm. Interfaz I2C. Ideal para Arduino/ESP32. Perfecto para evasión de obstáculos, medición precisa o robótica avanzada.
1 disponibles
Descripción
ℹ️ Información general
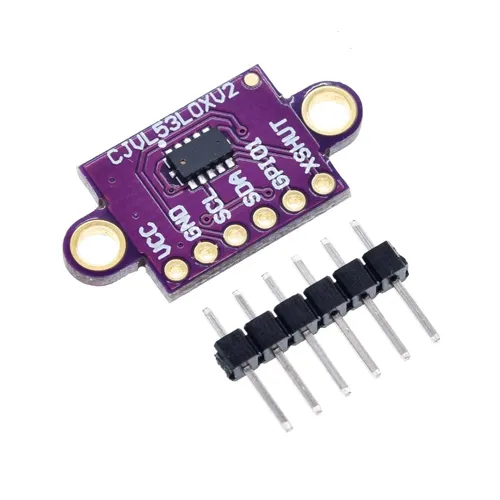
El VL53L0X es un sensor de distancia láser basado en tecnología Time-of-Flight (ToF), fabricado por STMicroelectronics. A diferencia de los sensores ultrasónicos o infrarrojos, mide la distancia con luz láser de 940 nm y tiempo de vuelo, lo que le da una precisión milimétrica, independencia del color o reflectividad del objeto, y capacidad para funcionar en ambientes oscuros o brillantes. Ideal para robots de navegación autónoma, sistemas de estacionamiento, drones, wearables o cualquier proyecto donde necesites medición de distancia rápida, precisa y confiable.
El VL53L0X es un sensor de distancia láser basado en tecnología Time-of-Flight (ToF), fabricado por STMicroelectronics. A diferencia de los sensores ultrasónicos o infrarrojos, mide la distancia con luz láser de 940 nm y tiempo de vuelo, lo que le da una precisión milimétrica, independencia del color o reflectividad del objeto, y capacidad para funcionar en ambientes oscuros o brillantes. Ideal para robots de navegación autónoma, sistemas de estacionamiento, drones, wearables o cualquier proyecto donde necesites medición de distancia rápida, precisa y confiable.
⚙️ Especificaciones técnicas
- 📏 Tipo: Sensor ToF láser (940 nm)
- 📡 Interfaz: I2C (dirección predeterminada:
0x29) - ⚡ Voltaje de operación: 2.6V – 3.3V (lógica 3.3V — no usar 5V directamente)
- 🎯 Rango de medición:
- Corto alcance: 2 cm – 1.3 m (modo High Accuracy)
- Largo alcance: hasta 2 m (modo Long Range)
- 📏 Precisión: ±1 mm (en rangos cortos), ±3% en rangos largos
- 🕒 Tiempo de medición: ~30 ms por lectura (configurable)
- 📦 Dimensiones: ~10mm x 10mm (módulo compacto)
- 🧠 Chip principal: VL53L0X (STMicroelectronics)
- 🔋 Consumo: ~20 mA en modo activo, <10 µA en standby
- 🌐 Compatibilidad: Soporta múltiples sensores en el mismo bus I2C (con cambio de dirección via XSHUT)
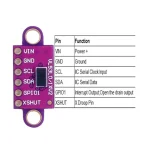
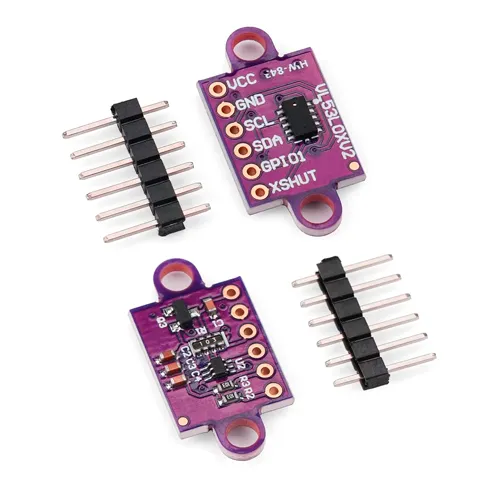
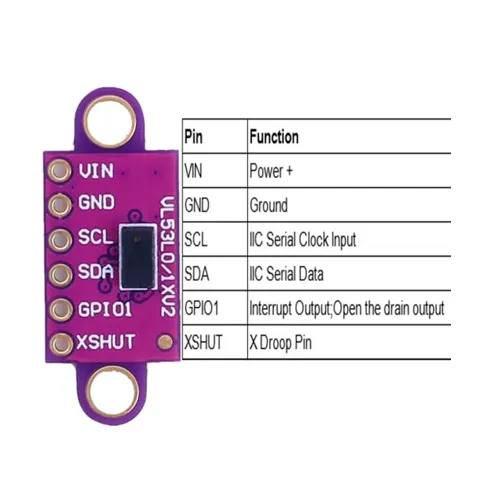
🔌 Información de conexionado (detallada y práctica)
🔹 Conexión típica con Arduino Uno/Nano (usando nivelador 5V→3.3V):
|
Pin del VL53L0X
|
Pin de Arduino
|
|---|---|
|
VCC
|
3.3V (no 5V!)
|
|
GND
|
GND
|
|
SCL
|
A5 (o GPIO22 en ESP32)
|
|
SDA
|
A4 (o GPIO21 en ESP32)
|
|
XSHUT
|
GND (para habilitar) o D3 (para control multiplexado)
|
⚠️ Importante:
- El VL53L0X requiere 3.3V en VCC y lógica. Si usas Arduino Uno/Nano (5V), debes usar un convertidor lógico 5V→3.3V en SCL/SDA, o alimentar el módulo desde el pin 3.3V del Arduino (si su regulador soporta la carga).
- Para ESP32, puedes conectar directamente a 3.3V y pines GPIO (recomendado: SCL=GPIO22, SDA=GPIO21).
✅ Librería recomendada:
Adafruit_VL53L0X (instalable desde el gestor de bibliotecas de Arduino IDE)📌 Ejemplo básico de código:
#include <Wire.h>
#include <Adafruit_VL53L0X.h>
Adafruit_VL53L0X lox = Adafruit_VL53L0X();
void setup() {
Serial.begin(9600);
if (!lox.begin()) {
Serial.println(«Fallo al inicializar VL53L0X»);
while (1);
}
Serial.println(«VL53L0X listo!»);
}
void loop() {
VL53L0X_RangingMeasurementData_t measure;
lox.rangingTest(&measure, false);
if (measure.RangeStatus != 4) { // 4 = error
Serial.print(«Distancia: «);
Serial.print(measure.RangeMilliMeter);
Serial.println(» mm»);
} else {
Serial.println(«Error de medición»);
}
delay(500);
}
⚠️ Recomendaciones clave:
- No cubras el sensor con plástico opaco ni material reflectante — afecta la precisión.
- Usa el modo «High Accuracy» para distancias <1 m (mejor resolución).
- El pin XSHUT permite apagar/desactivar el sensor o cambiar direcciones I2C para múltiples unidades.
- Evita vibraciones fuertes durante la medición — pueden causar ruido.
- En entornos con luz solar directa, usa un filtro óptico o coloca el sensor en una cavidad oscura.
💡 Usos sugeridos:
- Navegación autónoma de robots (SLAM básico)
- Drones con altímetro preciso
- Sistemas de estacionamiento asistido
- Medición de nivel en tanques transparentes
- Proyectos de realidad aumentada y gestos 3D



Valoraciones
No hay valoraciones aún.