




Sensor GY-521 MPU6050 giroscopio acelerómetro comm I2C
$16,00
Sensor GY-521 MPU6050: giroscopio 3 ejes + acelerómetro 3 ejes. Interfaz I2C. Ideal para Arduino/ESP32. Perfecto para drones, robots, estabilización o proyectos IoT de movimiento.
2 disponibles
Descripción
ℹ️ Información general
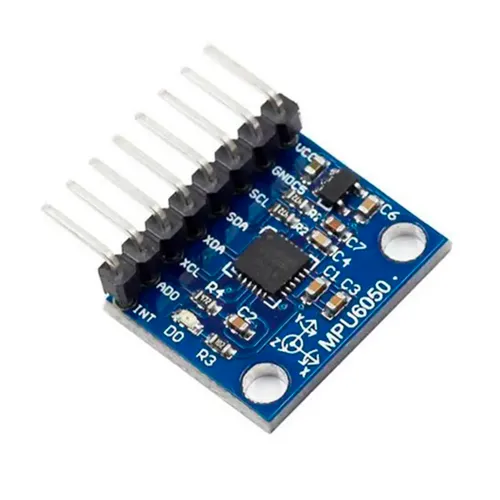
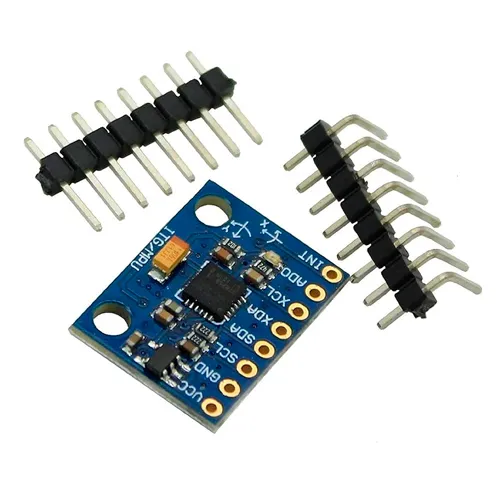
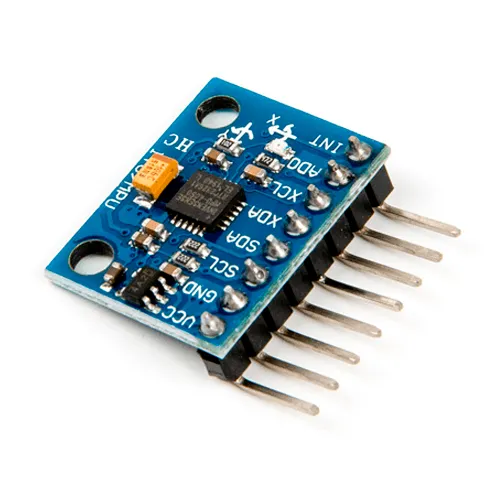
El módulo GY-521 con chip MPU6050 es un sensor inercial de 6 grados de libertad (6DOF) que combina un giroscopio de 3 ejes y un acelerómetro de 3 ejes en un solo chip. Fabricado por InvenSense (ahora TDK), es el estándar en proyectos de estabilización, control de drones, robots móviles, wearables y sistemas de realidad aumentada. Con interfaz I2C, se conecta fácilmente a Arduino, ESP32, Raspberry Pi o cualquier placa compatible. ¡Ideal para medir orientación, inclinación, rotación y aceleración en tiempo real!
El módulo GY-521 con chip MPU6050 es un sensor inercial de 6 grados de libertad (6DOF) que combina un giroscopio de 3 ejes y un acelerómetro de 3 ejes en un solo chip. Fabricado por InvenSense (ahora TDK), es el estándar en proyectos de estabilización, control de drones, robots móviles, wearables y sistemas de realidad aumentada. Con interfaz I2C, se conecta fácilmente a Arduino, ESP32, Raspberry Pi o cualquier placa compatible. ¡Ideal para medir orientación, inclinación, rotación y aceleración en tiempo real!
⚙️ Especificaciones técnicas
- 🧭 Tipo: Sensor inercial 6DOF (3 ejes acelerómetro + 3 ejes giroscopio)
- 📡 Interfaz: I2C (dirección predeterminada:
0x68— ajustable a0x69con pin AD0) - ⚡ Voltaje de operación: 3.3V – 5V (lógica 3.3V, pero soporta 5V en VCC con regulador interno)
- 📏 Rango configurable:
- Acelerómetro: ±2g, ±4g, ±8g, ±16g
- Giroscopio: ±250°/s, ±500°/s, ±1000°/s, ±2000°/s
- 🎯 Resolución:
- Acelerómetro: 16 bits (±2g → 16384 LSB/g)
- Giroscopio: 16 bits (±250°/s → 131 LSB/°/s)
- 🧠 Chip principal: MPU6050 (InvenSense)
- 📦 Integrado: Sensor de temperatura (±1°C)
- 📏 Dimensiones: ~24mm x 16mm
- 🔋 Consumo: ~3.5 mA (modo activo), <10 µA (modo sleep)
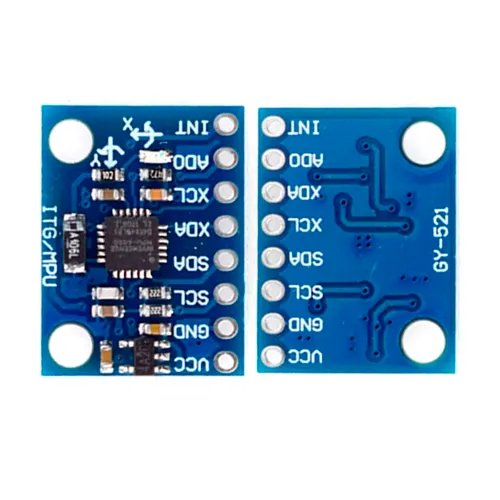
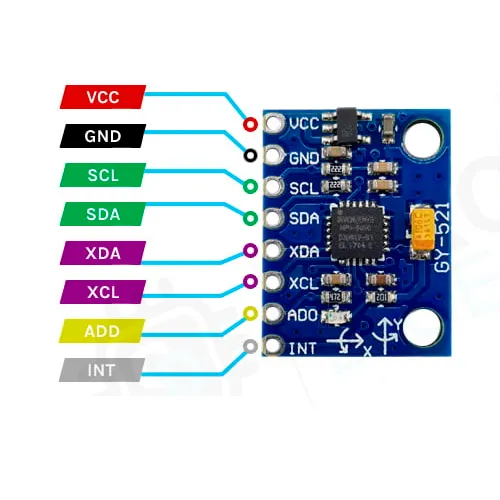
🔌 Información de conexionado (detallada y práctica)
🔹 Conexión típica con Arduino Uno/Nano:
|
Pin del GY-521
|
Pin de Arduino
|
|---|---|
|
VCC
|
5V
|
|
GND
|
GND
|
|
SCL
|
A5
|
|
SDA
|
A4
|
|
AD0
|
GND (para dirección 0x68) o VCC (para 0x69)
|
✅ Librería recomendada:
Adafruit_MPU6050(recomendada — moderna, con soporte para fusion de sensores)I2Cdevlib-MPU6050(clásica, muy usada)MPU6050_light(ligera, ideal para ESP8266/ESP32 con poca RAM)
📌 Ejemplo básico con
Adafruit_MPU6050:#include <Wire.h>
#include <Adafruit_MPU6050.h>
#include <Adafruit_Sensor.h>
Adafruit_MPU6050 mpu;
void setup() {
Serial.begin(9600);
while (!Serial);
if (!mpu.begin()) {
Serial.println(«Fallo al inicializar MPU6050»);
while (1);
}
Serial.println(«MPU6050 listo!»);
}
void loop() {
sensors_event_t a, g, temp;
mpu.getEvent(&a, &g, &temp);
Serial.print(«Accel X: «); Serial.print(a.acceleration.x); Serial.println(» m/s²»);
Serial.print(«Gyro X: «); Serial.print(g.gyro.x); Serial.println(» rad/s»);
Serial.println(«——————–«);
delay(500);
}
⚠️ Recomendaciones clave:
- El pin AD0 permite cambiar la dirección I2C:
- GND →
0x68(predeterminado) - VCC →
0x69(útil si usas múltiples MPU6050)
- GND →
- Para mayor precisión en orientación, usa fusion de sensores (Madgwick o Mahony) — las librerías como
Adafruit_MPU6050ya incluyen ejemplos. - El sensor tiene offsets de fábrica, pero para aplicaciones críticas, calibra los gyros y acelerómetros (ej. con
MPU6050_offset_calibrate()). - No lo expongas a impactos fuertes ni vibraciones extremas — puede afectar la precisión.
- Si usas ESP32, evita interferencias con WiFi: usa
Wire.begin(21, 22)para asignar pines personalizados si es necesario.
💡 Usos sugeridos:
- Estabilización de drones y quadcopters
- Control de robots con balanceo (seguidores, equilibrio)
- Wearables para seguimiento de movimiento
- Juegos con control por gestos (Arduino + Processing)
- Sistema de navegación inercial (con fusión de datos)

Valoraciones
No hay valoraciones aún.