






Sensor FC-51 HW-201 infrarrojo evasión obstáculos sigue línea
$12,00
Sensor infrarrojo FC-51/HW-201 para evasión de obstáculos y seguimiento de línea. Salida analógica + digital. Ideal para robots Arduino/ESP32. Fácil ajuste con potenciómetro.
Sin existencias
Descripción
ℹ️ Información general
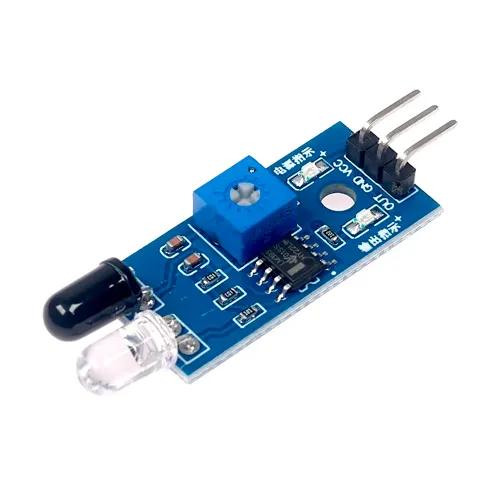
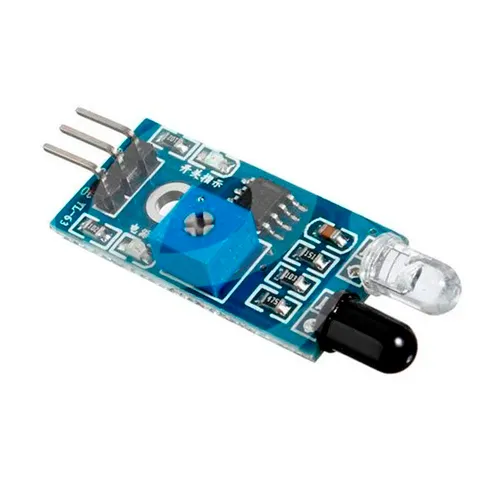
El sensor FC-51 / HW-201 es un módulo infrarrojo compacto y versátil diseñado para dos aplicaciones clave en robótica:
El sensor FC-51 / HW-201 es un módulo infrarrojo compacto y versátil diseñado para dos aplicaciones clave en robótica:
- 🚧 Detección de obstáculos (cuando el IR se refleja en un objeto cercano)
- 📏 Seguimiento de línea negra sobre fondo claro (usando contraste reflectivo)
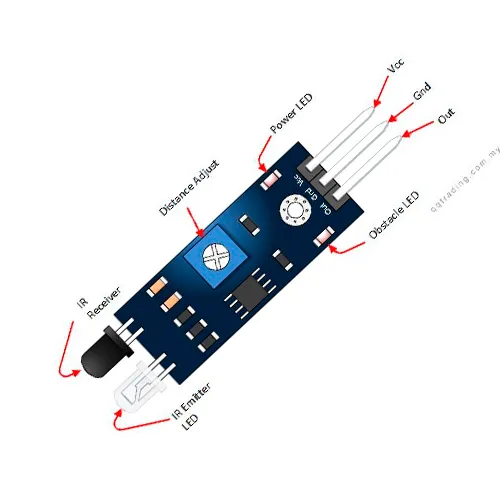
Incluye un emisor LED infrarrojo (940 nm) y un fototransistor receptor, con circuito de acondicionamiento basado en el comparador LM393. El umbral de activación es ajustable mediante un potenciómetro, lo que permite adaptarlo a distintas superficies, distancias o condiciones de luz ambiental. ¡Ideal para robots seguidores de línea, vehículos autónomos o proyectos educativos!
⚙️ Especificaciones técnicas
- 🌐 Tipo: Sensor reflectivo de infrarrojo (IR)
- 📊 Salidas:
- Analógica (A0): voltaje proporcional a la intensidad reflejada
- Digital (D0): HIGH/LOW según umbral ajustable
- ⚙️ Módulo: LM393 comparador + potenciómetro de ajuste
- ⚡ Voltaje de operación: 3.3V – 5V
- 📏 Rango de detección:
- Obstáculos: ~2–30 cm (depende de superficie y ajuste)
- Línea negra: ~0.5–3 cm (mejor con superficie blanca mate)
- 🔋 Consumo: < 15 mA
- 📦 Dimensiones: ~25mm x 15mm
- 🎯 Ángulo de haz: ~20° (ajustable con inclinación del sensor)
- 🛡️ Nota: Sensible a luz ambiental fuerte (evita sol directo o luces LED brillantes)
🔌 Información de conexionado (detallada y práctica)
🔹 Conexión típica con Arduino Uno/Nano:
|
Pin del módulo
|
Pin de Arduino
|
|---|---|
|
VCC
|
5V
|
|
GND
|
GND
|
|
A0 (analógico)
|
A0
|
|
D0 (digital)
|
D2
|
✅ Librería recomendada: Ninguna necesaria — usa
analogRead() y digitalRead() directamente.📌 Ejemplo básico para seguimiento de línea:
const int analogPin = A0;
const int digitalPin = 2;
void setup() {
Serial.begin(9600);
pinMode(digitalPin, INPUT);
}
void loop() {
int analogValue = analogRead(analogPin); // 0–1023
int digitalValue = digitalRead(digitalPin); // 0 = línea detectada, 1 = fondo
Serial.print(«Valor analógico: «);
Serial.print(analogValue);
Serial.print(» | Estado: «);
Serial.println(digitalValue ? «Fondo» : «Línea»);
delay(100);
}
⚠️ Recomendaciones clave:
- Para seguimiento de línea: coloca el sensor cerca del suelo (~1–2 cm), apuntando hacia abajo. Ajusta el potenciómetro hasta que D0 cambie al pasar sobre la línea negra.
- Para detección de obstáculos: orienta el sensor hacia adelante. Un objeto cercano reflejará más IR → valor analógico alto → D0 = LOW (si el umbral está bien ajustado).
- Evita superficies reflectantes (como metal o plástico brillante) — pueden dar falsos positivos en modo obstáculo.
- En entornos con mucha luz ambiental, cubre el sensor con tubo negro o usa modulación (no soportada por este módulo básico — requiere versiones avanzadas).
- No expongas el LED IR a impactos — es frágil.
💡 Usos sugeridos:
- Robot seguidor de línea (competencias escolares, FIRST LEGO League)
- Vehículo autónomo que evita obstáculos
- Sistema de conteo de objetos en cinta transportadora
- Proyectos de robótica educativa (Arduino + motores)
- Control de puertas automáticas con detección de presencia


Valoraciones
No hay valoraciones aún.