






Motor 28BYJ-48 stepper 4 fases 5 vdc
$10,00
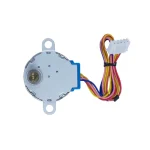
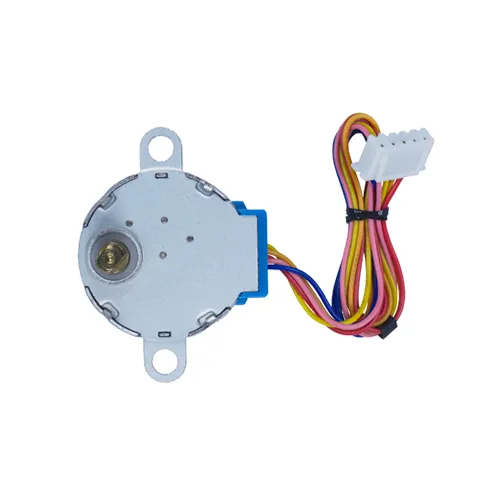
Motor paso a paso 28BYJ-48, 4 fases, 5V DC. Ideal para Arduino/ESP32. Incluye cable de 5 hilos y eje de 5 mm. Perfecto para relojes, dispensadores o robots educativos.
4 disponibles
Descripción
ℹ️ Información general
El motor paso a paso 28BYJ-48 es un actuador unipolar de bajo costo y alta relación torque/tamaño, diseñado para aplicaciones de movimiento lento y preciso donde no se requiere alto par motor. Con 4 fases, 5 V de alimentación y una relación de engranaje interna de 64:1, ofrece 4096 pasos por vuelta (64 pasos mecánicos × 64), lo que permite control muy fino sin necesidad de encoder externo.
El motor paso a paso 28BYJ-48 es un actuador unipolar de bajo costo y alta relación torque/tamaño, diseñado para aplicaciones de movimiento lento y preciso donde no se requiere alto par motor. Con 4 fases, 5 V de alimentación y una relación de engranaje interna de 64:1, ofrece 4096 pasos por vuelta (64 pasos mecánicos × 64), lo que permite control muy fino sin necesidad de encoder externo.
Incluye un cable de 5 hilos (rojo, marrón, amarillo, verde, naranja) y un eje de 5 mm con ranura para acoplar poleas, engranajes o agujas — ideal para proyectos como:
- ⏰ Relojes analógicos DIY
- 🧪 Dispensadores automáticos (líquidos, pastillas)
- 🤖 Robots móviles simples o brazos de 1 eje
- 📦 Sistemas de avance lineal (con husillo)
- 🎓 Kits educativos de mecatrónica
✅ Se controla fácilmente con el módulo ULN2003 y librerías como
AccelStepper o Stepper en Arduino.⚙️ Especificaciones técnicas
- 📏 Modelo: 28BYJ-48
- 🔌 Tipo: Unipolar, 4 fases, 8 polos
- ⚡ Voltaje nominal: 5 V DC
- 🔋 Corriente por bobina: ~24–30 mA (a 5 V)
- 📐 Pasos por vuelta:
- Mecánicos: 64
- Con engranaje 64:1 → 4096 pasos/vuelta
- 🌀 Ángulo por paso: 5.625° (mecánico) → 0.0879° (con engranaje)
- 📏 Diámetro: 28 mm
- 📏 Longitud: 32 mm
- ⚖️ Peso: ~30 g
- 🧱 Eje: 5 mm de diámetro, con ranura plana (para llave o acoplamiento)
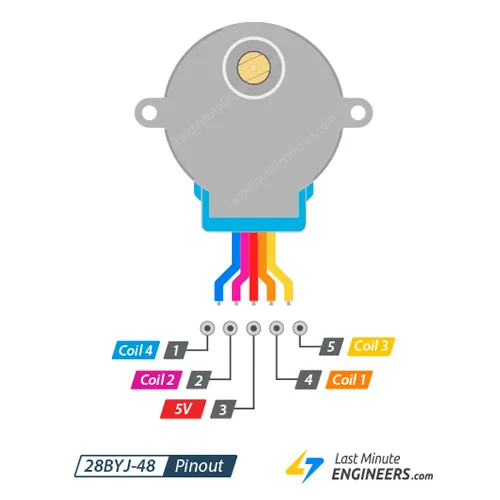
- 📦 Cable: 5 hilos (colores estándar: rojo=VCC, marrón=IN1, amarillo=IN2, verde=IN3, naranja=IN4)
🔌 Información de conexionado (detallada y práctica)
🔹 Conexión con módulo ULN2003 (recomendado):
|
Motor (cable)
|
ULN2003
|
|---|---|
|
Rojo (VCC)
|
VCC (5V)
|
|
Marrón
|
IN1
|
|
Amarillo
|
IN2
|
|
Verde
|
IN3
|
|
Naranja
|
IN4
|
✅ Código básico (Arduino + ULN2003):
#include <Stepper.h>
// 2048 pasos por vuelta (modo de 8 pasos) → 4096/2
Stepper myStepper(2048, 8, 9, 10, 11);
void setup() {
myStepper.setSpeed(5); // RPM
}
void loop() {
myStepper.step(2048); // 1 vuelta
delay(1000);
myStepper.step(-2048); // Vueltaa(1000);
}
⚠️ Recomendaciones clave:
- No conectes directamente al Arduino — usa un driver (ULN2003 o TB6612) para proteger los pines.
- El motor tiene bajo torque (~3–5 kg·cm) — no apto para cargas pesadas.
- Para mayor velocidad, reduce el
delay()o usa modo de 4 pasos (menos torque, más velocidad). - Si el motor se calienta, verifica que no esté sobrecargado o que la secuencia sea correcta.
- El eje de 5 mm acepta acoplamientos tipo set screw o collet para transmisión de movimiento.
💡 Usos sugeridos:
- Relojes de pared o de escritorio con movimiento suave
- Dispensadores de medicamentos o alimentos
- Puertas giratorias pequeñas
- Sistemas de posicionamiento óptico (ej. escáner láser casero)
- Proyectos educativos de control de movimiento


Valoraciones
No hay valoraciones aún.