






Módulo driver ULN2003 motor de paso
$10,00
Driver ULN2003 para motor paso a paso 28BYJ-48. Ideal para Arduino/ESP32. Bajo costo, fácil conexión. Perfecto para proyectos educativos, relojes, dispensadores o robots simples.
5 disponibles
Descripción
ℹ️ Información general
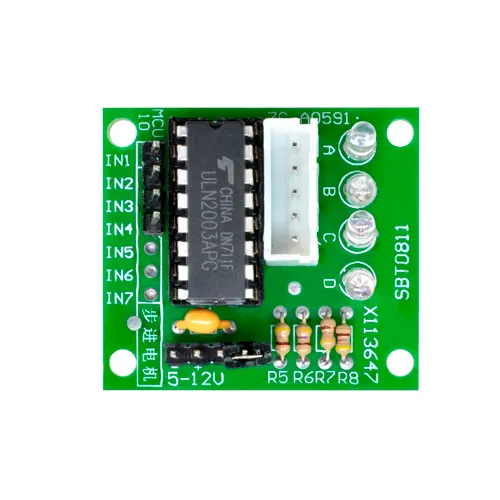
El módulo ULN2003 es un driver de bajo costo y alta confiabilidad diseñado específicamente para motores paso a paso unipolares de 4 fases, como el popular 28BYJ-48. Basado en el chip ULN2003A (matriz de 7 transistores Darlington), permite controlar el motor con solo 4 salidas digitales, sin necesidad de componentes adicionales. Es ideal para proyectos educativos, prototipos básicos, relojes analógicos, dispensadores automáticos, puertas giratorias o cualquier aplicación donde se requiera movimiento lento y económico — ¡sin micro-paso ni alta precisión, pero muy robusto y sencillo!
El módulo ULN2003 es un driver de bajo costo y alta confiabilidad diseñado específicamente para motores paso a paso unipolares de 4 fases, como el popular 28BYJ-48. Basado en el chip ULN2003A (matriz de 7 transistores Darlington), permite controlar el motor con solo 4 salidas digitales, sin necesidad de componentes adicionales. Es ideal para proyectos educativos, prototipos básicos, relojes analógicos, dispensadores automáticos, puertas giratorias o cualquier aplicación donde se requiera movimiento lento y económico — ¡sin micro-paso ni alta precisión, pero muy robusto y sencillo!
⚙️ Especificaciones técnicas
- 🧠 Chip principal: ULN2003A (Texas Instruments / ON Semiconductor)
- 🔌 Tipo de motor compatible: Unipolar, 4 fases, 8 polos (ej. 28BYJ-48)
- ⚡ Voltaje de operación del motor: 5V – 12V DC
- ⚡ Corriente por canal: Hasta 500 mA (máximo 0.5 A por transistor)
- 📏 Pasos por vuelta:
- 28BYJ-48: 64 pasos mecánicos × relación de engranaje 64:1 = 4096 pasos/vuelta
- 📊 Entradas de control: IN1–IN4 (señales digitales)
- 🔋 Consumo lógica: ~5 mA
- 📦 Dimensiones: ~25mm x 18mm
- 🎛️ Indicador LED: Sí (cada canal tiene LED de estado)
- 🌡️ Protección: Diodes de rueda libre integrados (para inducción del motor)
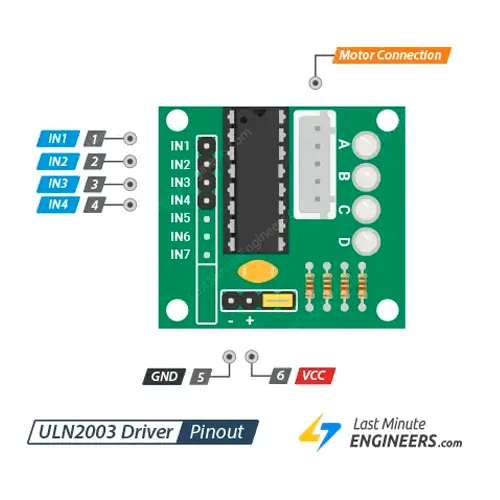
🔌 Información de conexionado (detallada y práctica)
🔹 Conexión típica con Arduino Uno/Nano:
|
Pin del ULN2003
|
Pin de Arduino
|
|---|---|
|
IN1
|
D8
|
|
IN2
|
D9
|
|
IN3
|
D10
|
|
IN4
|
D11
|
|
VCC
|
5V (o 12V si el motor lo requiere)
|
|
GND
|
GND
|
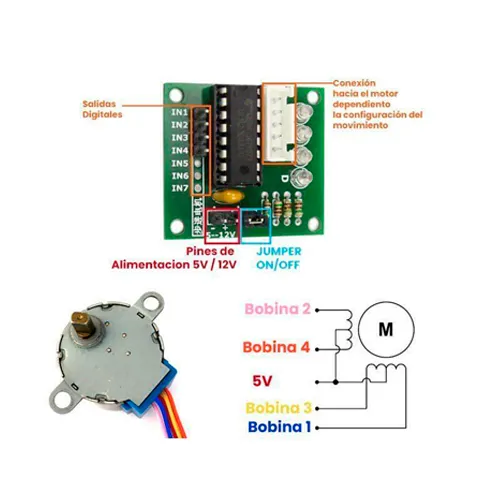
📌 Conexión al motor 28BYJ-48 (5 cables):
|
Cable motor
|
Color
|
Conexión ULN2003
|
|---|---|---|
|
Rojo
|
VCC
|
VCC (5V/12V)
|
|
Pardo
|
IN1
|
IN1
|
|
Amarillo
|
IN2
|
IN2
|
|
Verde
|
IN3
|
IN3
|
|
Naranja
|
IN4
|
IN4
|
✅ Librería recomendada:
AccelStepper (modo FULL4WIRE) o código manual simple.📌 Ejemplo básico (secuencia de 4 pasos):
const int in1 = 8;
const int in2 = 9;
const int in3 = 10;
const int in4 = 11;
int sequence[8][4] = {
{1,0,0,0}, {1,1,0,0}, {0,1,0,0}, {0,1,1,0},
{0,0,1,0}, {0,0,1,1}, {0,0,0,1}, {1,0,0,1}
};
void setup() {
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
}
void loop() {
for (int i = 0; i < 8; i++) {
digitalWrite(in1, sequence[i][0]);
digitalWrite(in2, sequence[i][1]);
digitalWrite(in3, sequence[i][2]);
digitalWrite(in4, sequence[i][3]);
delay(2); // Velocidad ajustable
}
}
⚠️ Recomendaciones clave:
- El motor 28BYJ-48 es de bajo torque — no apto para cargas pesadas (máximo ~3–5 kg·cm).
- Para mayor velocidad, reduce el
delay()— pero no menos de 1 ms (puede perder pasos). - Si el motor se calienta, verifica que no esté sobrecargado o que la secuencia sea correcta.
- El ULN2003 no soporta motores bipolares (como NEMA 17) — solo unipolares de 4 fases.
- Usa alimentación separada si el motor consume >300 mA (evita sobrecargar el regulador de Arduino).
- Para reversa, invierte el orden de la secuencia (ej.
for (int i = 7; i >= 0; i--)).
💡 Usos sugeridos:
- Relojes analógicos DIY con motor paso a paso
- Dispensadores de medicamentos o alimentos
- Puertas giratorias pequeñas
- Proyectos escolares de física y electrónica
- Control de válvulas o compuertas lentas



Valoraciones
No hay valoraciones aún.