




Módulo driver A4988 motor de paso
$15,00
Driver A4988 para motor paso a paso. Control preciso, micro-paso hasta 1/16. Ideal para Arduino/ESP32. Corriente ajustable hasta 2A. Perfecto para impresoras 3D, robots o CNC.
5 disponibles
Descripción
ℹ️ Información general
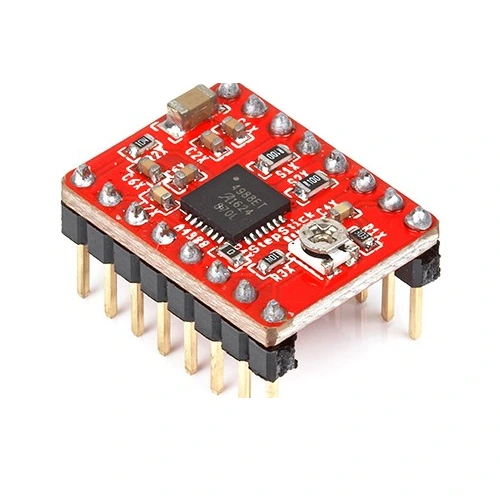
El módulo A4988 es un controlador de motor paso a paso de alta eficiencia fabricado por Allegro MicroSystems, diseñado para manejar motores bipolares de 2 fases (como NEMA 17, NEMA 23) con precisión y bajo ruido. Incluye funciones clave como micro-paso (hasta 1/16), protección térmica y sobrecorriente, y ajuste de corriente vía potenciómetro. Es el estándar en impresoras 3D DIY, robots cartesianos, sistemas de posicionamiento y proyectos donde se requiere movimiento controlado sin vibración excesiva.
El módulo A4988 es un controlador de motor paso a paso de alta eficiencia fabricado por Allegro MicroSystems, diseñado para manejar motores bipolares de 2 fases (como NEMA 17, NEMA 23) con precisión y bajo ruido. Incluye funciones clave como micro-paso (hasta 1/16), protección térmica y sobrecorriente, y ajuste de corriente vía potenciómetro. Es el estándar en impresoras 3D DIY, robots cartesianos, sistemas de posicionamiento y proyectos donde se requiere movimiento controlado sin vibración excesiva.
✅ Ideal para integrar en shields CNC, placas personalizadas o prototipos con Arduino, ESP32, Raspberry Pi Pico, etc.
⚙️ Especificaciones técnicas
- 🧠 Chip principal: A4988 (Allegro)
- ⚙️ Modos de paso: Full, Half, 1/4, 1/8, 1/16 (micro-paso)
- 🔌 Alimentación del motor: 8V – 35V DC
- ⚡ Corriente máxima por bobina: 2.0 A (ajustable con potenciómetro)
- 📏 Resolución: Hasta 16 micro-pasos por paso completo
- 📊 Entradas de control:
- STEP: pulso para avanzar un paso
- DIR: dirección (HIGH/LOW)
- ENABLE: activa/desactiva el driver (bajo = activo)
- MS1, MS2, MS3: selección de modo de paso
- 🔋 Consumo lógica: ~10 mA
- 🌡️ Protecciones integradas:
- Térmica (thermal shutdown)
- Sobrecorriente (overcurrent protection)
- Cortocircuito en salida
- 📦 Dimensiones: ~22mm x 15mm
- 📌 Pines: 8 pines macho (2×4) + terminal para motor (4 cables)
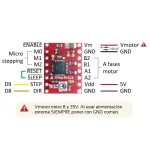
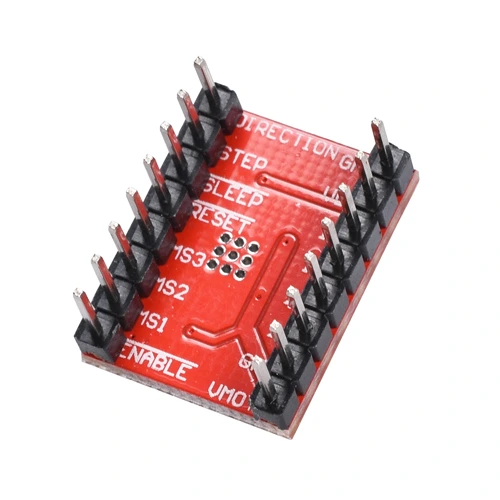
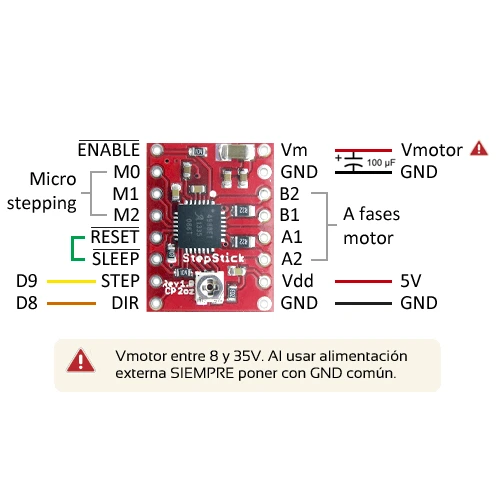
🔌 Información de conexionado (detallada y práctica)
🔹 Conexión típica con Arduino Uno:
|
Pin del A4988
|
Pin de Arduino
|
|---|---|
|
VDD (lógica)
|
5V
|
|
GND
|
GND
|
|
STEP
|
D2
|
|
DIR
|
D3
|
|
ENABLE
|
D4 (opcional)
|
|
MS1, MS2, MS3
|
GND / 5V según modo (ver tabla abajo)
|
|
VMOT
|
Fuente externa 8–35V (para motor)
|
|
GND (motor)
|
GND común
|
📌 Configuración de micro-paso (MS1–MS3):
|
MS1
|
MS2
|
MS3
|
Modo
|
|---|---|---|---|
|
GND
|
GND
|
GND
|
Full step
|
|
VCC
|
GND
|
GND
|
Half step
|
|
GND
|
VCC
|
GND
|
1/4 step
|
|
VCC
|
VCC
|
GND
|
1/8 step
|
|
VCC
|
VCC
|
VCC
|
1/16 step
|
✅ Librería recomendada:
AccelStepper o ArduinoStepper para control avanzado.📌 Ejemplo básico (modo 1/16, sin ENABLE):
const int stepPin = 2;
const int dirPin = 3;
void setup() {
pinMode(stepPin, OUTPUT);
pinMode(dirPin, OUTPUT);
}
void loop() {
digitalWrite(dirPin, HIGH); // Dirección horaria
for (int i = 0; i < 200; i++) {
digitalWrite(stepPin, HIGH);
delayMicroseconds(100);
digitalWrite(stepPin, LOW);
delayMicroseconds(100);
}
delay(1000);
}
⚠️ Recomendaciones clave:
- Ajuste de corriente crítico:
- Gira el potenciómetro en sentido antihorario hasta el mínimo.
- Conecta el motor y alimenta VMOT.
- Mide el voltaje en el resistor de sensado (RS = 0.05 Ω):
Icoil=Vref×2.5(ej. Vref=0.4V→I=1.0A)
- Usa multímetro para ajustar con precisión.
- Nunca conectes/disconectes el motor con VMOT activo — puede dañar el driver.
- Para motores de 4 cables (bipolares), conecta:
- A1–A2 → una bobina
- B1–B2 → otra bobina
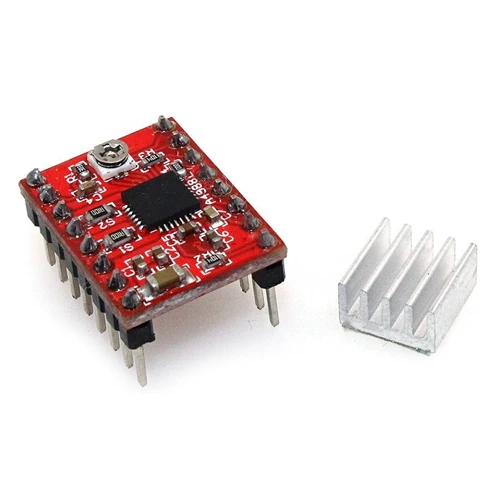
- El A4988 se calienta — si usas >1.2A, añade un disipador de aluminio o ventilador pequeño.
- No uses con 3.3V lógica directa sin nivelador (el A4988 espera 5V para señales de control).
💡 Usos sugeridos:
- Impresoras 3D (ej. Prusa, Anet)
- Robots de eje lineal o brazos robóticos
- Sistemas de avance automático (cintas, mesas XY)
- Proyectos educativos de mecatrónica y control de movimiento
- Cámara pan-tilt con precisión micrométrica


Valoraciones
No hay valoraciones aún.